Humanoid Navigation in Uneven Terrain using Learned Estimates of Traversability University of Michigan ARM Lab 1:43 7 years ago 226 Далее Скачать
Long-horizon humanoid navigation planning using traversability estimates and previous experience University of Michigan ARM Lab 3:12 3 years ago 2 324 Далее Скачать
PUTN: A Plane-fitting based Uneven Terrain Navigation Framework zhuozhu jian 1:00 2 years ago 631 Далее Скачать
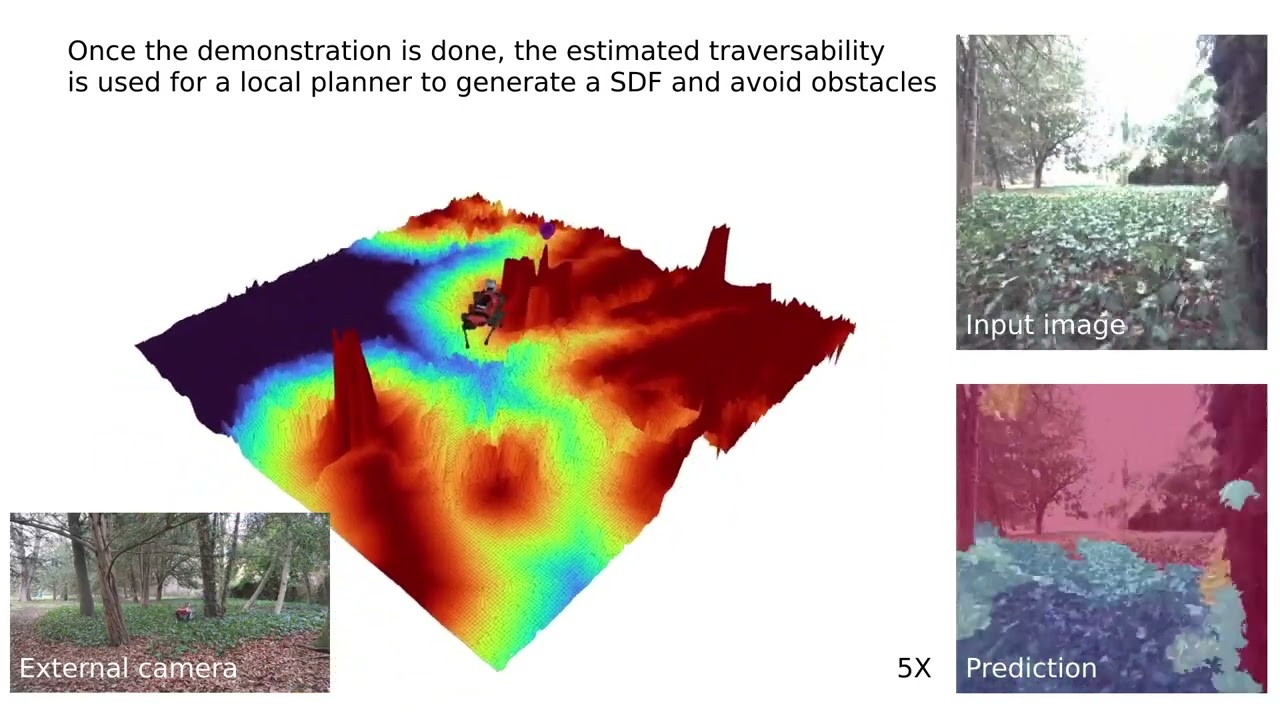
Fast Traversability Estimation for Wild Visual Navigation Oxford Dynamic Robot Systems Group 5:12 9 months ago 553 Далее Скачать
Humanoid Navigation Planning in Large Unstructured Environments... University of Michigan ARM Lab 1:00 6 years ago 148 Далее Скачать
How Rough is the Path? Terrain Traversability Estimation for Local and Global Path Planning Paulo Vinicius 1:26 4 years ago 273 Далее Скачать
Traversability Mapping and Autonomous Navigation in Urban Area and Rough Terrain Tixiao Shan 2:37 7 years ago 1 791 Далее Скачать
[2022] 2.5D Mapping, Pathfinding and Path Following In Uneven Terrain Intelligent Robots 1:51 2 years ago 725 Далее Скачать
TNS: Terrain Traversability Mapping and Navigation System for Autonomous Excavators -- RSS 2022 Tianrui Guan 3:17 2 years ago 556 Далее Скачать
A Framework for Terrain Traversability Mapping and Planning in Uneven and Unstructured Environments NKU-RaHAIC 2:32 1 year ago 189 Далее Скачать
Humanoid Navigation Based on RGB Camera Images and Odometry Humanoids Bonn 1:18 11 years ago 827 Далее Скачать
Hybrid Terrain Traversability Analysis in Off-road Environments Tiga Ho Yin Leung 1:27 3 years ago 133 Далее Скачать
Elevation Mapping & Traversability Estimation for Legged Robots | Zedmini camera Arghya Chatterjee 10:53 1 year ago 732 Далее Скачать
GONet: Semi-Supervised Deep Learning Approach For Traversability Estimation Jack Rabbot 5:43 6 years ago 666 Далее Скачать